연구개발
현장을 이해하고 고객 신뢰를 이끄는 기술을 연구합니다.

자동차 검사기술의 중심
아이앤티 & 아이앤티로보틱스
기업부설연구소
기술연구소는 에어리크 검사, 비전 검사 기술, EV배터리셀 조립공정 및 검사, 파츠 정렬 협동로봇, AMR(자율이동로봇) 기술을 중심으로 스마트 제조 솔루션을 연구·개발하고 있습니다.
AI 비전 알고리즘과 이미지처리 기술을 활용한 비전 검사, 협동로봇을 활용한 파츠 정렬 공정, 자율이동로봇 기술을 기반한 AMR 개발을 통해 고정밀·고효율의 생산 환경을 구현하며, 자동차 및 다양한 산업 분야의 제조 혁신을 이끌고 있습니다.
| 연구소명 | 아이앤티 기업부설연구소 아이앤티로보틱스 기업부설연구소 |
설립일 | 아이앤티 부설연구소: 2013년 3월 13일 아이앤티로보틱스 부설연구소: 2024년 3월 25일 |
|---|---|---|---|
| 주소 | 오산시 동부대로 372 | 연락처 | 070-4800-1941 |
| 연구소명 | 아이앤티 기업부설연구소 아이앤티로보틱스 기업부설연구소 |
|---|---|
| 설립일 | 아이앤티 부설연구소: 2013년 3월 13일 아이앤티로보틱스 부설연구소: 2024년 3월 25일 |
| 주소 | 오산시 동부대로 372 |
| 연락처 | >070-4800-1941 |

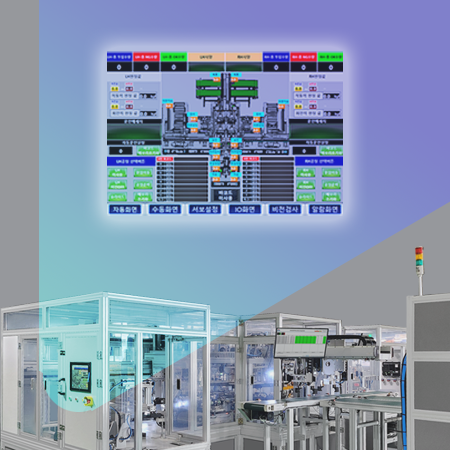
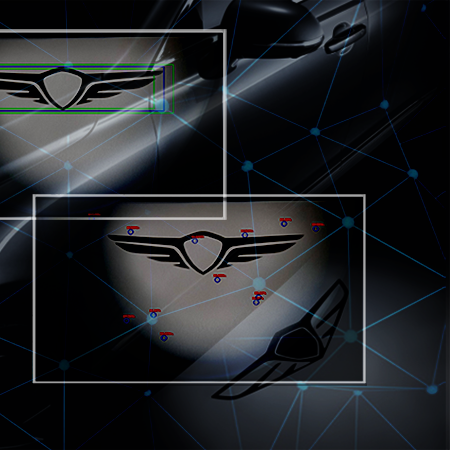
딥러닝 기반의 비전 인식 기술로 제품의 위치, 패턴, 각도, 정렬, 불량 검출, 학습 데이터 관리 및 실시간 검사로 품질 안정성 극대화를 목표로 합니다.

배터리셀 캡 플레이트 조립 과정에서 발생할 수 있는 미세 불량을 최소화하기 위해 자동화 설비와 정밀 제어 기술을 적용하고, 비전 검사와 누설 검사, 누액 검사 등 다양한 품질 검사 기술을 통해 공정 안정성과 생산 효율을 동시에 향상시키는 데 중점을 두고 있습니다.

에어리크 검사 기술 연구는 자동차 전장 부품 및 배터리 제품의 기밀성과 내구성을 확보하기 위한 핵심 기술입니다. 미세 누설까지 정밀하게 검출할 수 있는 고감도 검사 알고리즘과 안정적인 압력 제어 기술을 기반으로, 제품의 품질 신뢰성을 높이고 장기적인 안전성을 확보하는 검사 솔루션을 연구·개발하고 있습니다.

생산 조립 공정에서의 파츠 정밀 정렬을 위해 산업용 협동로봇과 비전 검사, 이미지 학습 기술을 융합한 지능형 제어 시스템을 연구합니다. 카메라 기반 영상 분석과 학습 알고리즘을 통해 파츠의 위치와 방향을 인식하고, 협동로봇이 이를 실시간으로 보정·제어하여 정밀하고 안정적인 자동 정렬 공정을 구현하는 것을 목표로 합니다.

AMR(Autonomous Mobile Robot) 개발 연구는 자율이동 기술을 기반으로 공장 및 물류 환경에서 자재와 제품을 효율적으로 이송하는 지능형 물류 시스템을 구현하는 것을 목표로 합니다. 실시간 환경 인식과 경로 판단 기술을 통해 유연하고 안전한 무인이송 환경을 구축하여 생산성과 운영 효율을 동시에 향상시키는 데 중점을 두고 있습니다
| 항목 | 주요연구내용 |
|---|---|
|
비전 검사 기술 |
로고램프의 이물, 각도, 기울기, 스케일, 왜곡, 색상, 투명도 등 딥러닝 기반의 비전 검사 엔진 연구 조립라인 공정별 조립 데이터 관리, EOL 공정 완제품 전수 검사, 누락/이종/통전/통신수행 등 비전 솔루션 연구 |
|
EV배터리셀 조립공정 및 검사 기술 |
전기차종(EV) 배터리 셀 어셈블리 제품 조립라인 설계 및 구축 연구 배터리 셀 CAP PLATE, ASSY 제품 관련 검사: 에어 리크 검사, 리벳팅, 파단압 검사, 비전 검사 등 배터리 제품의 품질과 생산성 연구 벤트 부 레이저 용접, 리벳부 리벳팅 작업 |
|
에어리크 검사 기술 |
컴팩트형 에어리크테스터 연구: 고해상도 압력디케이, 조작이 간편한 터치식 메뉴와 UI, 정확도 높은 결과 도출 연구 정밀도를 높이기 위한 유량 검사 연구 |
|
협동로봇을 활용한 파츠 정렬 공정 |
생산 조립 공정 내 파츠 정밀 정렬을 위한 협동로봇 기술 비전 검사 시스템을 활용한 부품 위치 및 방향 인식 기술 이미지 학습 기반 부품 판별 및 정렬 알고리즘 비전 데이터 기반 협동로봇 실시간 제어 및 자동 정렬 시스템 구축 |
|
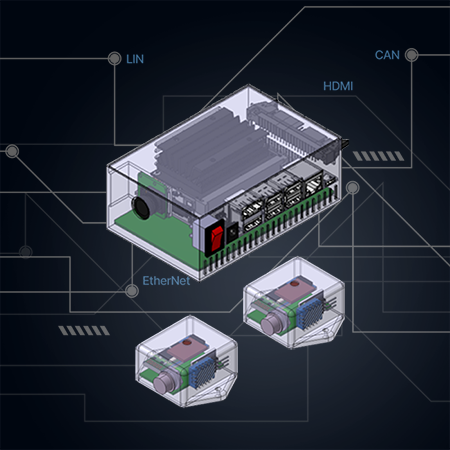
AMR(자율이동로봇) 개발 |
카메라, 라이다(LiDAR), 센서 활용 자율주행 기반 실내 물류 환경 인식 기술 개발 동적 장애물 회피 및 최적 경로 생성 알고리즘 연구 작업자와 협업 가능한 안전 주행 및 관제 시스템 구축 |